Stability exercises solutions#
Solutions to the exercises on stability.
Solution to Exercise 4.1
So the stability function is \(R(z) = 1 + z + \frac{1}{2} z^2 + \frac{1}{6} z^3 + \frac{1}{24} z^4\)
Code
from sympy import *
# Define ERK method
A = Matrix([[0, 0, 0, 0, 0],
[Rational(1,4), 0, 0, 0, 0],
[Rational(1,2), 0, 0, 0, 0],
[0, Rational(1,2), Rational(1,4), 0, 0],
[0, Rational(1,6), -Rational(1,3), Rational(1,6), 0]])
b = Matrix([[-1], [Rational(2,3)], [-Rational(1,3)], [Rational(2,3)], [1]])
e = ones(5, 1)
# Calculate coefficients
for k in range(1, len(b) + 1):
print((b.T * A ** (k - 1) * e)[0])
% Define ERK method
A = [0, 0, 0, 0, 0 ;
1/4, 0, 0, 0, 0 ;
1/2, 0, 0, 0, 0 ;
0, 1/2, 1/4, 0, 0 ;
0, 1/6, -1/3, 1/6, 0];
b = [-1 ; 2/3 ; -1/3 ; 2/3 ; 1];
e = ones(5, 1);
% Calculate coefficients
for k = 1 : length(b)
sym(b' * A ^ (k - 1) * e)
end
Solution to Exercise 4.2
Check the roots of \(Q(z)\)
so the roots of \(Q(z)\) have positive real parts so the first condition for A-stability is satisfied.
Check that \(E(y) \geq 0\)
so \(E(y) \geq 0\) and the second condition for A-stability is satisfied. Since both conditions are satisfied then this method is A-stable
Code
import sympy as sp
# Define numerator and denominator functions
def P(z):
return (I - z * A + z * ebT).det()
def Q(z):
return (I - z * A).det()
# Define RK method
A = sp.Matrix([[sp.Rational(7,24), -sp.Rational(1,24)], [sp.Rational(13,24), sp.Rational(5,24)]])
ebT = sp.Matrix([[sp.Rational(1,2), 0], [0, sp.Rational(1,2)]])
I = sp.eye(2)
# Calculate R(z)
z, y = sp.symbols('z, y')
R = P(z) / Q(z)
print("R(z) = ")
display(R)
# Check roots of Q have positive real parts
print('roots of Q(z) = ')
display(sp.solve(Q(z)))
# Check E(y) >= 0
E = Q(1j * y) * Q(-1j * y) - P(1j * y) * P(-1j * y)
print('E(y) = ')
display(sp.simplify(sp.nsimplify(E)))
% Define IRK method
A = [7/24, -1/24 ; 13/24, 5/24];
ebT = [1/2, 0 ; 0, 1/2];
I = eye(2);
% Calculate R(z)
syms z y
P = @(z) det(I - z * A + z * ebT);
Q = @(z) det(I - z * A);
Rz = P(z) / Q(z)
% Check roots of Q have positive real parts
solve(Q(z) == 0)
% Check E(y) >= 0
E = Q(1i * y) * Q(-1i * y) - P(1i * y) * P(-1i * y)
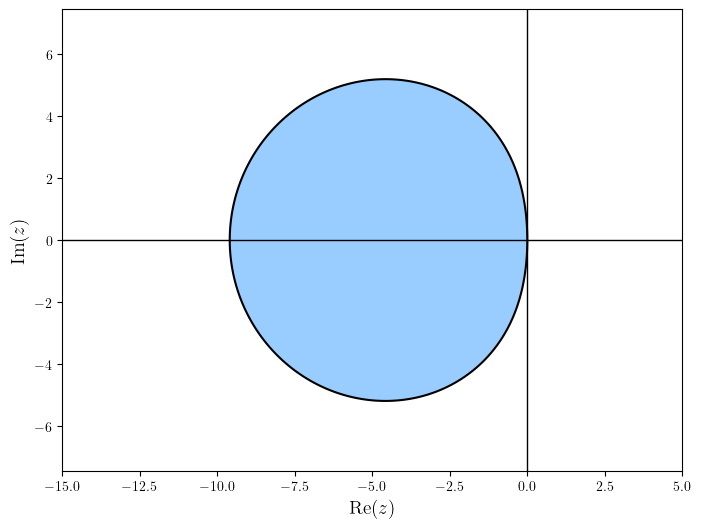
Solution to Exercise 4.3
Determine the stability function
Plot
Code
Determine stability function
import sympy as sp
# Define RK method
A = sp.Matrix([[sp.Rational(1,3), 0], [1, 0]])
ebT = sp.Matrix([[sp.Rational(3,4), 0], [0, sp.Rational(1,4)]])
I = sp.eye(2)
# Define numerator and denominator functions
def P(z):
return (I - z * A + z * ebT).det()
def Q(z):
return (I - z * A).det()
# Calculate R(z)
z, y = sp.symbols('z, y')
Rz = P(z) / Q(z)
print("R(z) = ")
display(sp.nsimplify(Rz))
Plot region of absolute stability
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['text.usetex'] = True # allows use of LaTeX in labels
# Generate z values
X, Y = np.meshgrid(np.linspace(-10, 10, 200), np.linspace(-10, 10, 200))
Z = X + Y * 1j
# Define stability function
R = (1 + 2 / 3 * Z + 5 / 48 * Z ** 2) / (1 - 1 / 3 * Z)
# Plot stability region
fig = plt.figure(figsize=(8, 6))
plt.contourf(X, Y, abs(R), levels=[0, 1], colors="#99ccff")
plt.contour(X, Y, abs(R), colors= "k", levels=[0, 1])
plt.axhline(0, color="k", linewidth=1)
plt.axvline(0, color="k", linewidth=1)
plt.axis("equal")
plt.axis([-15, 5, -7, 7])
plt.xlabel("$\mathrm{Re}(z)$", fontsize=14)
plt.ylabel("$\mathrm{Im}(z)$", fontsize=14)
plt.show()
Determine stability function
% Define IRK method
A = [1/3, 0 ; 1, 0];
ebT = [3/4, 0 ; 0, 1/4];
I = eye(2);
% Calculate R(z)
syms z y
P = @(z) det(I - z * A + z * ebT);
Q = @(z) det(I - z * A);
Rz = P(z) / Q(z)
Plot region of absolute stability
% Generate z values
[X, Y] = meshgrid(linspace(-10, 10, 200), linspace(-10, 10, 200));
Z = X + Y * 1i;
% Define stability function
R = (1 + 2 / 3 * Z + 5 / 48 * Z .^ 2) ./ (1 - 1 / 3 * Z);
% Plot stability region
contourf(X, Y, abs(R), [0, 1], LineWidth=2)
xline(0, LineWidth=2)
yline(0, LineWidth=2)
colormap([153, 204, 255 ; 255, 255, 255] / 255)
axis equal
axis([-15, 5, -7, 7])
xlabel("$\mathrm{Re}(z)$", FontSize=12, Interpreter="latex")
ylabel("$\mathrm{Im}(z)$", FontSize=12, Interpreter="latex")
Solution to Exercise 4.4
Calculate the eigenvalues of the coefficient matrix
so the stiffness ratio is \(S = 200\). The Euler method is stable for \(h\lambda \in [-2, 0]\) so the maximum step length is