2.6. Solving Initial Value Problems using Explicit Runge-Kutta Methods#
The general form of an explicit Runge-Kutta method for solving an Initial Value Problem (IVP) is
To apply an explicit Runge-Kutta method we calculate the stage values \(k_1, k_2, \dots, k_s\) using the known values of \(t_n\) and \(y_n\) and the step length \(h\). Then the solution over one step \(y_{n+1}\) is then calculated using the values of \(k_1, k_2, \ldots, k_s\).
Algorithm 2.1 (Solving an IVP using an explicit Runge-Kutta method)
Inputs A first-order ODE of the form \(y' = f(t, y)\), a domain \(t \in [t_0, t_{\max}]\), an initial value \(y(t_0) = y_0\) and a step length \(h\)
Outputs \((t_0, t_1, \ldots)\) and \((y_0, y_1, \ldots)\)
\(nsteps \gets \left\lfloor \dfrac{b - a}{h} \right\rfloor\)
For \(n = 0, \ldots, nsteps\)
For \(i = 1, \ldots, s\)
\(k_i \gets f(t_n + c_i h, y_n + h (a_{i1}k_1 + a_{i2}k_2 + \cdots + a_{i,i-1}k_{i-1}))\)
\(y_{n+1} \gets y_n + h (b_1k_1 + b_2k_2 + \cdots + b_sk_s)\)
\(t_{n+1} \gets t_n + h\)
Return \((t_0, t_1, \ldots)\) and \((y_0, y_1, \ldots)\)
Example 2.7
Calculate the solution to the following initial value problem using the RK4 method with \(h = 0.2\)
Solution
Here the ODE function is \(f(t, y)=ty\), \(t_0 = 0\), \(y_0 = 1\) and \(h = 0.2\). First, we calculate the number of steps required
The RK4 method is
Calculating the stage values for the first step
The solution at the first step is
Repeating this for the other steps in the method gives the values in the table below.
\(n\) |
\(t_n\) |
\(y_n\) |
\(k_1\) |
\(k_2\) |
\(k_3\) |
\(k_4\) |
|---|---|---|---|---|---|---|
0 |
0.0 |
1.000000 |
- |
- |
- |
- |
1 |
0.2 |
1.020201 |
0.000000 |
0.100000 |
0.101000 |
0.204040 |
2 |
0.4 |
1.083287 |
0.204040 |
0.312182 |
0.315426 |
0.433315 |
3 |
0.6 |
1.197217 |
0.433315 |
0.563309 |
0.569809 |
0.718349 |
4 |
0.8 |
1.377126 |
0.718330 |
0.888335 |
0.900235 |
1.101811 |
5 |
1.0 |
1.648717 |
1.101701 |
1.338567 |
1.359885 |
1.649103 |
2.6.1. Code#
The code below defines a function called rk4() which computes the solution to an IVP.
def rk4(f, tspan, y0, h):
nsteps = int((tspan[1] - tspan[0]) / h)
m = len(y0)
t = np.zeros(nsteps + 1)
y = np.zeros((nsteps + 1, m))
t[0] = tspan[0]
y[0,:] = y0
for n in range(nsteps):
k1 = f(t[n], y[n,:])
k2 = f(t[n] + 0.5 * h, y[n,:] + 0.5 * h * k1)
k3 = f(t[n] + 0.5 * h, y[n,:] + 0.5 * h * k2)
k4 = f(t[n] + h, y[n,:] + h * k3)
y[n+1,:] = y[n,:] + h / 6 * (k1 + 2 * k2 + 2 * k3 + k4);
t[n+1] = t[n] + h
return t, y
function [t, y] = rk4(f, tspan, y0, h)
nsteps = floor((tspan(2) - tspan(1)) / h);
m = length(y0);
t = zeros(1, nsteps + 1);
y = zeros(nsteps + 1, m);
t(1) = tspan(1);
y(1,:) = y0;
for n = 1 : length(t) - 1
k1 = f(t(n), y(n,:));
k2 = f(t(n) + 1/2 * h, y(n,:) + 1/2 * h * k1);
k3 = f(t(n) + 1/2 * h, y(n,:) + 1/2 * h * k2);
k4 = f(t(n) + h, y(n,:) + h * k3);
y(n+1,:) = y(n,:) + h / 6 * (k1 + 2 * k2 + 2 * k3 + k4);
t(n+1) = t(n) + h;
end
y = y;
end
The rk4() function has been used to solve the IVP from Example 2.7 which is shown in Fig. 2.4.
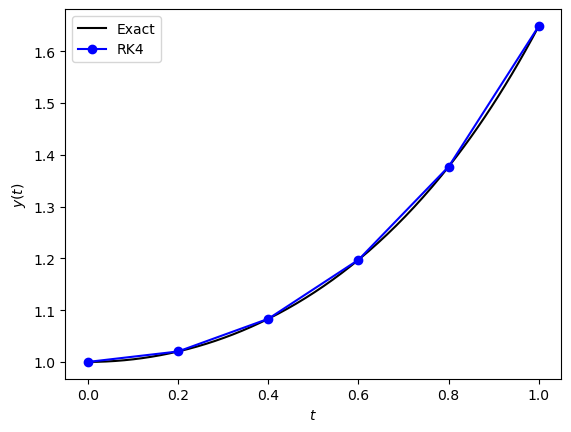
Fig. 2.4 The solution to the IVP \(y'=ty\), \(t \in [0,1]\), \(y(0)=1\) using the RK4 method with \(h=0.2\).#
2.6.2. Comparison of first, second and fourth-order solutions#
The first-order Euler, RK2 and RK4 method solutions to the IVP from Example 2.7 have been plotted against the exact solution in Fig. 2.5.
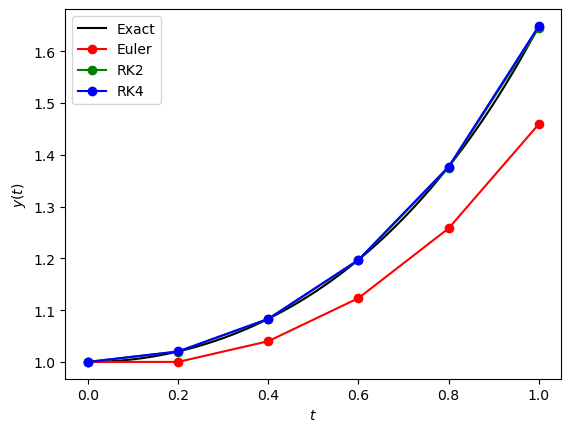
Fig. 2.5 Comparisons between the Euler method, Heun’s method and the RK4 method for solving the IVP \(y'=ty\), \(t \in [0,1]\), \(y(0)=1\) with \(h=0.2\)#
Here we see that the second-order and fourth-order method are significantly more accurate than the first-order method. However, in this plot it is difficult to see the difference between the second and fourth-order solutions.
We can compare the accuracy of different methods by computing the solutions for over different values of the step length and calculate the global truncation errors for a point in the domain. The three methods have been applied to solve the IVP from Example 2.7 using step lengths \(h = 0.2, 0.1, 0.05, 0.025\) and the global truncation errors at \(t = 1\) are tabulated below.
\(h\) |
Euler |
RK2 |
RK4 |
|---|---|---|---|
0.200 |
1.89e-01 |
3.88e-03 |
4.59e-06 |
0.100 |
1.02e-01 |
8.40e-04 |
2.64e-07 |
0.050 |
5.28e-02 |
1.92e-04 |
1.55e-08 |
0.025 |
2.69e-02 |
4.55e-05 |
9.33e-10 |
We have seen in chapter 1 that as the step lengths \(h\) decrease, the errors in the Euler method decrease in a linear fashion, i.e., \(E_n = O(h)\), i.e., first-order accurate. We expect that the RK2 method and the RK4 method will have errors \(O(h^2)\) and \(O(h^4)\) respectively. By the definition of \(O(h^n)\) the global truncation error should approximate \(h^n\). Applying logarithms to both sides gives
This is a linear function where the slope of \(\log(E_n)\) has a gradient of \(n\). The global truncation errors for the three methods have been plotted on a loglog scale in Fig. 2.6
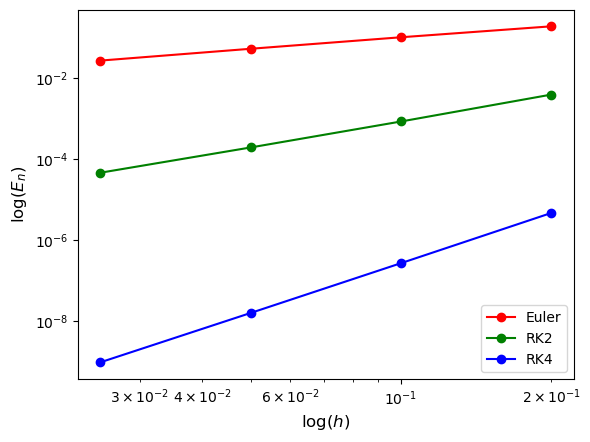
Fig. 2.6 Plots of the the global truncation errors for the Euler method, the RK2 method and the RK4 method on a loglog scale.#
The loglog plots of the global truncation errors are linear functions where we can clearly see the distinction between the errors for the three methods. The order of the methods \(n\) can be approximated using
where \(h_1 > h_2\). Using the values from the table of errors above
which confirm the order of accuracy of the three methods.