1.4. Higher-order ODEs#
We have seen that the Euler method can be used to solve a first-order ODE of the form \(y' = f(t, y)\), so what happens when we want to solve a higher order ODE? The solution is we write a higher order ODE as system of first-order ODEs and apply the Euler method to solve the system. For example consider the \(N\)-th order ODE
If we introduce functions \(y_1(t), y_2(t), \ldots, y_N(t)\) where \(y_1=y\), \(y_2 =y'\), \(y_3 =y''\) and so on then
This is a system of \(N\) first-order ODEs, so we can apply the Euler method to solve the system to give an equivalent solution to the \(N\)-th order ODE.
Example 1.3
A mass-spring-damper model consists of objects connected via springs and dampers. A simple example of the application of a model is a single object connected to a surface is shown in Fig. 1.10.

Fig. 1.10 The mass-spring-damper model [Wikipedia, 2008].#
The displacement of the object over time can be modelled by the second-order ODE
where \(y\) represents the displacement of the object, \(\dot{y}\) represents the change in the displacement over time (i.e., velocity), \(m\) represents the mass of the object, \(c\) is the damping coefficient and \(k\) is a spring constant based on the length and elasticity of the spring.
An object of mass 1 kg is connected to a dampened spring with \(c = 2\) and \(k = 4\). The object is displaced by 1m and then released. Use the Euler method to compute the displacement of the object over the first 5 seconds after it was released.
Solution
We first need to rewrite the governing equation as a system of first-order ODEs. Let \(y_1 = y\) and \(y_2 = \dot{y}\) then we have the system of two first-order ODEs
Since \(m = 1\), \(c = 2\) and \(k = 4\) then writing the system in vector form \(\dot{\mathbf{y}} = f(t, \mathbf{y})\) gives
The initial conditions are \(y_1 = 1\) (displacement) and \(y_2 = 0\) (velocity of the object). Using the Euler method with a step length of \(h = 0.1\)
A plot of the displacement of the object (\(y_1\)) in the first 5 seconds of being released is shown in Fig. 1.11.
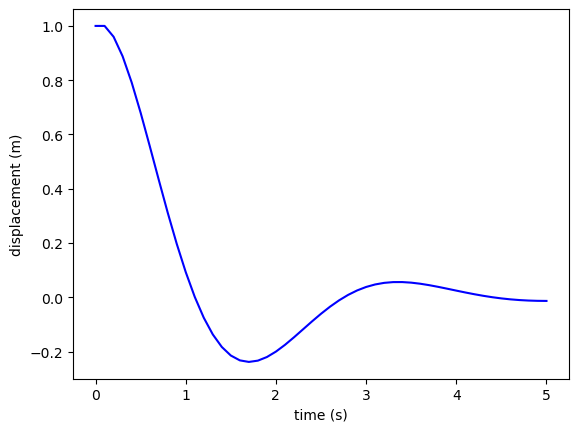
Fig. 1.11 Euler method solutions for the mass-spring-damper model with \(m = 1\), \(c = 2\), \(k = 4\) and initial displacement 1m.#
1.4.1. Code#
The code below sets up and solves the mass-sprint-damper model example from Example 1.3 using the Euler method.
# Define Mass-Spring model
def spring(t, y):
return np.array([ y[1], (- c * y[1] - k * y[0]) / mass ])
# Define IVP parameters
tspan = [0, 5] # boundaries of the t domain
y0 = [1, 0] # initial values
h = 0.1 # step length
mass = 1; # mass of object
c = 2; # damping coefficient
k = 4; # spring constant
# Solve the IVP using the Euler method
t, y = euler(spring, tspan, y0, h)
# Plot solution
fig, ax = plt.subplots()
plt.plot(t, y[:,0], "b-")
plt.xlabel("time (s)")
plt.ylabel("displacement (m)")
plt.show()
% Define mass-spring-damper model
spring = @(t, y, mass, c, k) [ y(2) , (-c * y(2) - k * y(1)) / mass];
% Define IVP parameters
tspan = [0, 5]; % boundaries of the t domain
y0 = [1, 0]; % initial values [S, I, R]
h = 0.1; % step length
mass = 1; % mass of object
c = 2; % damping coefficient
k = 4; % spring constant
% Solve the IVP using the Euler method
[t, y] = euler(@(t, y)spring(t, y, mass, c, k), tspan, y0, h);
% Plot solution
plot(t, y(:, 1), 'b-', LineWidth=2)
xlabel('time (seconds)', Fontsize=14, Interpreter='latex')
ylabel('displacement (m)', Fontsize=14, Interpreter='latex')
axis padded