Implicit Runge-Kutta methods exercise solutions#
Solutions to the exercises on implicit Runge-Kutta methods.
Solution to Exercise 3.1
Checking the \(B(k)\) condition
so the \(B(k)\) condition is satisfied up to \(k=2\). Checking the \(C(1)\) condition
so the \(C(1)\) condition is satisfied. Checking the \(D(1)\) condition
so the \(D(1)\) conditions is satisfied. Therefore this method is a second-order method.
Solution to Exercise 3.2
A third-order Radau IIA method has \(s=2\) stages with \(c_2 = 1\). The value of \(c_1\) is the other root of \(0 = P_2(t) - P_1(t)\) and the \(a_{ij}\) and \(b_i\) coefficients satisfy the \(B(3)\) and \(C(2)\) conditions respectively.
Solving the order conditions using Python of MATLAB:
import sympy as sp
# Define symbolic variables
a11, a12, a21, a22, b1, b2, c1, c2 = sp.symbols("a11, a12, a21, a22, b1, b2, c1, c2")
# Define Legendre polynomial
def P(n):
Pn, x = 0, sp.symbols('x')
for k in range(n + 1):
Pn += sp.binomial(n, k) * sp.binomial(n + k, k) * (x - 1) ** k
return Pn
# Calculate c values
c1, c2 = sp.solve(P(2) - P(1))
print(f"c1 = {c1}\nc2 = {c2}")
# Define order conditions
eq1 = b1 + b2 - 1
eq2 = b1 * c1 + b2 - sp.Rational(1,2)
eq3 = a11 + a12 - c1
eq4 = a11 + a12 - c1
eq5 = a21 + a22 - 1
eq6 = a11 * c1 + a12 - sp.Rational(1,2) * c1 ** 2
eq7 = a21 * c1 + a22 - sp.Rational(1,2)
# Solve order conditions
sp.solve((eq1, eq2, eq3, eq4, eq5, eq6, eq7))
syms a11 a12 a21 a22 b1 b2 c1 c2
% Calculate c coefficients
c = solve(P(2) - P(1))
c1 = c(1);
c2 = c(2);
% Define order conditions
eq1 = b1 + b2 == 1;
eq2 = b1 * c1 + b2 == 1/2;
eq3 = b1 * c1 ^ 2 + b2 == 1/3;
eq3 = a11 + a12 == c1;
eq4 = a21 + a22 == 1;
eq5 = a11 * c1 + a12 * c2 == 1/2 * c1^2;
eq6 = a21 * c1 + a22 * c2 == 1/2;
% Solve order conditions
solve(eq1, eq2, eq3, eq4, eq5, eq6, eq7)
% -------------------------------------------------------------------
function Pn = P(n)
syms x
Pn = 0;
for k = 0 : n
Pn = Pn + nchoosek(n, k) * nchoosek(n + k, k) * (x - 1) ^ k;
end
end
Output:
c1 = 1/3
c2 = 1
{b1: 3/4, b2: 1/4, a11: 5/12, a12: -1/12, a21: 3/4, a22: 1/4}
So the third-order RadauIIA method is
Solution to Exercise 3.3
The Butcher tableau for the Radau IIA method is
The stage values are
and since \(f(t,y) = t - y \) then
For this problem \(y(0) = 1\) and \(h = 0.4\). Using starting estimates of \(Y_1 = Y_2 = 1\) the iteration values are
\(k\) |
\(Y_1^{(k)}\) |
\(Y_2^{(k)}\) |
Max difference |
|---|---|---|---|
0 |
1.000000 |
1.000000 |
- |
1 |
0.875556 |
0.717333 |
2.83e-01 |
2 |
0.886874 |
0.742204 |
2.49e-02 |
3 |
0.885817 |
0.740035 |
2.17e-03 |
4 |
0.885921 |
0.740220 |
1.86e-04 |
5 |
0.885909 |
0.740205 |
1.52e-05 |
The solution over the first step is
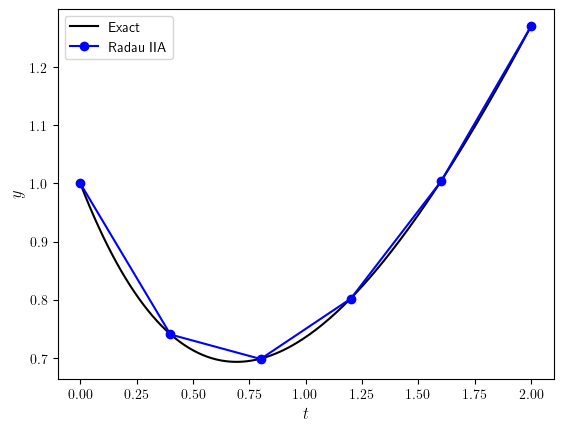
Solution to Exercise 3.4
Table
| t | y | Exact | Error |
|:----:|:---------:|:---------:|:--------:|
| 0.00 | 1.000000 | 1.000000 | 0.00e+00 |
| 0.40 | 0.740207 | 0.740640 | 4.33e-04 |
| 0.80 | 0.698075 | 0.698658 | 5.83e-04 |
| 1.20 | 0.801801 | 0.802388 | 5.87e-04 |
| 1.60 | 1.003268 | 1.003793 | 5.25e-04 |
| 2.00 | 1.270232 | 1.270671 | 4.39e-04 |
Plot
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['text.usetex'] = True # allows use of LaTeX in labels
def solveIVP(f, tspan, y0, h, solver):
# Initialise t and y arrays
t = np.arange(tspan[0], tspan[1] + h, h)
y = np.zeros((len(t),len(y0)))
t[0] = tspan[0]
y[0,:] = y0
# Loop through steps and calculate single step solver solution
for n in range(len(t) - 1):
y[n+1,:] = solver(f, t[n], y[n,:], h)
return t, y
def radauIIA(f, t, y, h):
# Calculate stage values
Y1, Y2 = np.ones(len(y0)), np.ones(len(y0))
Y1old, Y2old = np.ones(len(y0)), np.ones(len(y0))
for k in range(10):
Y1 = y + h * (5/12 * f(t + 1/3 * h, Y1) - 1/12 * f(t + h, Y2))
Y2 = y + h * (3/4 * f(t + 1/3 * h, Y1) + 1/4 * f(t + h, Y2))
if max(np.amax(abs(Y1 - Y1old)), np.amax(abs(Y2 - Y2old))) < 1e-4:
break
Y1old, Y2old = Y1, Y2
return y + h / 4 * (3 * f(t + 1/3 * h, Y1) + f(t + h,Y2))
# Define ODE function
def f(t, y):
return t - y
def exact(t):
return t + 2 * np.exp(-t) - 1
# Define IVP
tspan = [0, 2] # boundaries of the t domain
y0 = [1] # solution at the lower boundary
h = 0.4 # step length
tol = 1e-4 # convergence tolerance
# Solve IVP using the IRK method
t, y = solveIVP(f, tspan, y0, h, radauIIA)
# Print table of solution values
print("| t | y | Exact | Error |")
print("|:----:|:---------:|:---------:|:--------:|")
for n in range(len(t)):
print(f"| {t[n]:4.2f} | {y[n,0]:9.6f} | {exact(t[n]):9.6f} | {abs(exact(t[n]) - y[n,0]):0.2e} |")
# Plot solutions
t_exact = np.linspace(tspan[0], tspan[1], 200)
y_exact = exact(t_exact)
fig, ax = plt.subplots()
plt.plot(t_exact, y_exact, "k", label="Exact")
plt.plot(t, y, "bo-", label="Radau IIA")
plt.xlabel("$t$", fontsize=12)
plt.ylabel("$y$", fontsize=12)
plt.legend()
plt.show()
% Define ODE function and exact solution
f = @(t, y) t - y;
exact = @(t) t + 2 * exp(-t) - 1;
% Define IVP parameters
tspan = [0, 2]; % boundaries of the t domain
y0 = 1; % initial value of the solution
h = 0.4; % step length
tol = 1e-4; % accuracy tolerance
% Calculate the solution to the IVP
[t, y] = solveIVP(f, tspan, y0, h, @radauIIA);
% Calculate exact solution for plotting
texact = linspace(tspan(1), tspan(2), 200);
yexact = exact(texact);
% Plot solution
plot(texact, yexact, 'k-', LineWidth=2)
hold on
plot(t, y, 'b-o', LineWidth=2, MarkerFaceColor='b')
hold off
axis padded
xlabel('$t$', FontSize=14, Interpreter='latex')
ylabel('$y$', FontSize=14, Interpreter='latex')
legend('Exact', 'Radau IIA', Location='northwest', FontSize=12)
% --------------------------------------------------------------------
function [t, y] = solveIVP(f, tspan, y0, h, solver)
% Define t and y arrays
t = (tspan(1) : h : tspan(2));
y = zeros(length(t), length(y0));
y(1,:) = y0;
% Loop through the steps and calculate single step solver solution
for n = 1 : length(t) - 1
y(n+1,:) = solver(f, t(n), y(n,:), h);
end
end
% --------------------------------------------------------------------
function ynew = radauIIA(f, t, y, h)
neq = length(y);
Y1 = ones(neq);
Y2 = ones(neq);
Y1old = ones(neq);
Y2old = ones(neq);
for k = 1 : 10
Y1 = y + h * (5/12 * f(t + 1/3 * h, Y1) - 1/12 * f(t + h, Y2));
Y2 = y + h * (3/4 * f(t + 1/3 * h, Y1) + 1/4 * f(t + h, Y2));
if max(max(abs(Y1 - Y1old)), max(abs(Y2 - Y2old))) < 1e-4
break
end
Y1old = Y1;
Y2old = Y2;
end
ynew = y + h / 4 * (3 * f(t + 1/3 * h, Y1) + f(t + h, Y2));
end