4.6. A-stability#
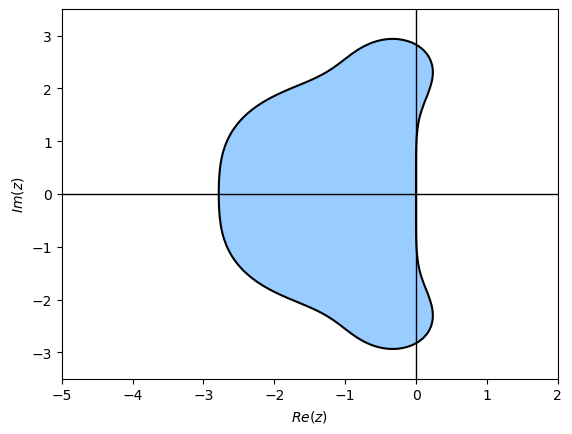
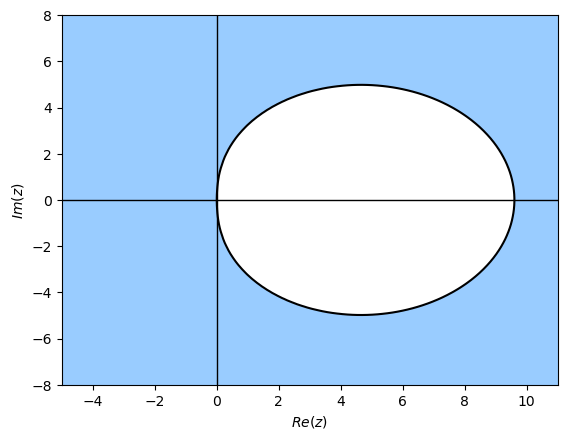
The plots of the region of absolute stability for the explicit RK4 method and the implicit Radau IA method are shown in Fig. 4.4 and Fig. 4.5. We can see that the region of absolute stability for the explicit method is bounded in the left-hand side of the complex plane, whereas the region of absolute stability for the implicit Radau IA method is unbounded. This means that the step length used for the RK4 method needs to be less than some value in order for the method to be stable, whereas for the Radua IA method the step length can be any value. This property is known as A-stability.
Definition 4.8 (A-stability)
A method is said to be A-stable if its region of absolute stability satisfies
i.e., the method is stable for all points in the left-hand side of the complex plane.
Theorem 4.1 (Conditions for A-stability)
Given an implicit Runge-Kutta method with a stability function of the form
and define the \(E\)-polynomial function
then the method is A-stable if and only if the following are satisfied
Criterion A: All roots of \(Q(z)\) have positive real parts;
Criterion B: \(E(y)\geq 0\) for all \(y\in \mathbb{R}\).
Example 4.3
The Radua IA method is defined by the following Butcher tableau
Determine whether this method is A-stable and plot the region of absolute stability.
Solution
We saw in Example 4.2 that the stability function for the Radau IA method is
Here \(Q(z) = 1 - \frac{2}{3}z + \frac{1}{6}z^2\) which has roots at \(z = 2 \pm \sqrt{2}\) which both have positive real parts so criterion A for A-stability is satisfied. Using equation (4.8)
Since \(y_2\) and \(y_4\) are positive for all \(y\) then \(E(y)>0\) so criterion B for A-stability is satisfied. Since both criterion A and B are satisfied then we can say that this is an A-stable method.
4.6.1. Code#
The Python and MATLAB code used to determine the stability function for the IRK method from Example 4.3 is given below.
import sympy as sp
def P(z):
return 1 + 1/3 * z + 1/16 * z ** 2
def Q(z):
return 1 - 2/3 * z + 1/6 * z ** 2
# Check roots of Q(z)
sp.pprint(sp.solve(Q(z)))
# Check E(y)
y = sp.symbols('y')
sp.pprint(sp.simplify(Q(1j * y) * Q(-1j * y) - P(1j * y) * P(-1j * y)))
P = @(z) 1 + 1/3 * z + 1/16 * z ^ 2;
Q = @(z) 1 - 2/3 * z + 1/6 * z ^ 2;
% Check roots of Q(z)
solve(Q(z))
% Check E(y) >= 0
syms y
simplify(Q(1i * y) * Q(-1i * y) - P(1i * y) * P(-1i * y))