Linear Transformations Exercise Solutions#
Solution to Exercise 6.1
(a) Let \(\mathbf{u} = (u_1, u_2), \mathbf{v} = (v_1, v_2) \in \mathbb{R}^2\) and \(\alpha \in \mathbb{R}\)
therefore \(T\) is a linear transformation.
(b) \(T\) is not a linear transformation since
(c) Let \(\mathbf{u} = (u_1, u_2), \mathbf{v} = (v_1, v_2) \in \mathbb{R}^2\) and \(\alpha \in \mathbb{R}\)
therefore \(T\) is a linear transformation.
(d) Let \(\mathbf{u} = (u_1, u_2, v_3),\mathbf{v} = (v_1, v_2, v_3)\in \mathbb{R}^3\) and \(\alpha \in \mathbb{R}\)
therefore \(T\) is a linear transformation.
(e) \(T\) is not a linear transformation since
(f) Let \(u = f(x), v = g(x) \in P(\mathbb{R})\) and \(\alpha \in \mathbb{R}\):
therefore \(T\) is a linear transformation.
(g) Let \(u = f(x), v = g(x) \in P(\mathbb{R})\) and \(\alpha \in \mathbb{R}\):
therefore \(T\) is a linear transformation.
Solution to Exercise 6.2
The transformation matrix is
Calculating \(T (2, 5)\)
Solution to Exercise 6.3
The transformation matrix is
so the inverse is
Therefore
Solution to Exercise 6.4
The transformation matrix is determined using equation (6.2) which is
Using Gauss-Jordan elimination to calculate the inverse of \((\mathbf{u}_1, \mathbf{u}_2, \mathbf{u}_3)^{-1}\)
So \((\mathbf{u}_1, \mathbf{u}_2, \mathbf{u}_3)^{-1} = \begin{pmatrix} -1 & -2 & 1 \\ 1 & 1 & 0 \\ -2 & -2 & 1 \end{pmatrix}\) and
Checking \(A\)
Solution to Exercise 6.5
The transformation matrix is
therefore
Solution to Exercise 6.6
The transformation matrix is
therefore
Solution to Exercise 6.7
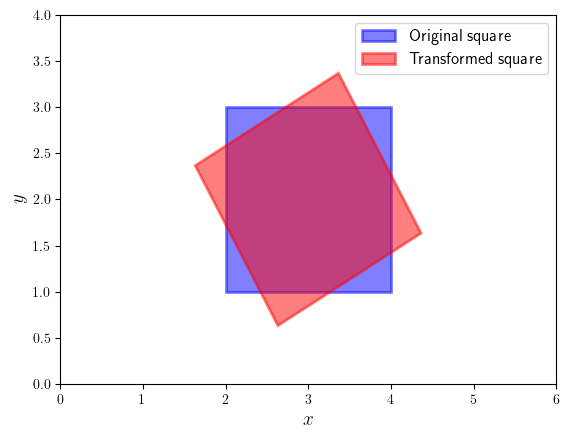
(a) \(\begin{pmatrix} 2 & 4 & 4 & 2 \\ 1 & 1 & 3 & 3 \\ 1 & 1 & 1 & 1 \end{pmatrix} \)
(b) Translate by \((-3, -2)\) so that the centre of the square is at the origin:
Rotate by \(\pi/3\) clockwise about the origin:
Translate by \((3, 2)\) so that the centre of the square is back to \(\mathbf{c}\)
(c) Calculate composite alignment matrix
Apply composite transformation matrix